#include <EigenFactorPlaneCenter.hpp>
Public Member Functions | |
| EigenFactorPlaneCenter (Factor::robustFactorType robust_type=Factor::robustFactorType::QUADRATIC) | |
| void | evaluate_residuals () override |
| void | evaluate_jacobians () override |
| void | evaluate_chi2 () override |
 Public Member Functions inherited from mrob::EigenFactorPlane Public Member Functions inherited from mrob::EigenFactorPlane | |
| EigenFactorPlane (Factor::robustFactorType robust_type=Factor::robustFactorType::QUADRATIC) | |
| void | print () const |
| MatRefConst | get_obs () const |
| VectRefConst | get_residual () const |
| MatRefConst | get_information_matrix () const |
| MatRefConst | get_jacobian ([[maybe_unused]] mrob::factor_id_t id=0) const override |
| MatRefConst | get_hessian (mrob::factor_id_t id=0) const override |
| VectRefConst | get_state (void) const override |
| void | add_point (const Mat31 &p, std::shared_ptr< Node > &node, matData_t &W) override |
| void | add_points_array (const MatX &P, std::shared_ptr< Node > &node, mrob::matData_t &W) override |
| void | add_points_S_matrix (const Mat4 &S, std::shared_ptr< Node > &node, mrob::matData_t &W) override |
| Mat31 | get_mean_point (factor_id_t id) |
| Public Member Functions inherited from mrob::EigenFactor | |
| EigenFactor (robustFactorType factor_type=QUADRATIC, uint_t potNumberNodes=5) | |
| Public Member Functions inherited from mrob::Factor | |
| Factor (uint_t dim, uint_t allNodesDim, robustFactorType factor_type=QUADRATIC, uint_t potNumberNodes=5) | |
| matData_t | get_chi2 () const |
| factor_id_t | get_id () const |
| void | set_id (factor_id_t id) |
| uint_t | get_dim_obs () const |
| void | set_dim_obs (uint_t dim) |
| uint_t | get_all_nodes_dim () const |
| void | set_all_nodes_dim (uint_t dim) |
| const std::vector< std::shared_ptr< Node > > * | get_neighbour_nodes (void) const |
| matData_t | evaluate_robust_weight (matData_t u, matData_t params=0.0) |
Protected Member Functions | |
| void | estimate_plane () override |
| Protected Member Functions inherited from mrob::EigenFactorPlane | |
| void | calculate_all_matrices_S () |
| void | calculate_all_matrices_Q () |
Protected Attributes | |
| Mat4 | accumulatedCenterQ_ |
| Mat41 | planeEstimationUnit_ |
| Mat4 | Tcenter_ |
| Protected Attributes inherited from mrob::EigenFactorPlane | |
| std::deque< factor_id_t > | nodeIds_ |
| std::unordered_map< factor_id_t, uint_t > | reverseNodeIds_ |
| std::deque< Mat61, Eigen::aligned_allocator< Mat61 > > | J_ |
| std::deque< Mat6, Eigen::aligned_allocator< Mat6 > > | H_ |
| std::deque< Mat4, Eigen::aligned_allocator< Mat4 > > | S_ |
| std::deque< Mat4, Eigen::aligned_allocator< Mat4 > > | Q_ |
| Mat4 | accumulatedQ_ |
| Mat41 | planeEstimation_ |
| Mat41 | planeEstimationCenter_ |
| std::deque< std::deque< Mat31, Eigen::aligned_allocator< Mat31 > > > | allPlanePoints_ |
| std::deque< std::deque< matData_t > > | allPointsInformation_ |
| uint_t | numberPoints_ |
| matData_t | planeError_ |
| Mat4 | Tcenter_ |
| Protected Attributes inherited from mrob::Factor | |
| factor_id_t | id_ |
| std::vector< std::shared_ptr< Node > > | neighbourNodes_ |
| uint_t | dim_ |
| uint_t | allNodesDim_ |
| matData_t | chi2_ |
| robustFactorType | robust_type_ |
| matData_t | robust_weight_ |
Additional Inherited Members | |
| Public Types inherited from mrob::Factor | |
| enum | robustFactorType { QUADRATIC = 0, HUBER, CAUCHY, MCCLURE, RANSAC } |
Detailed Description
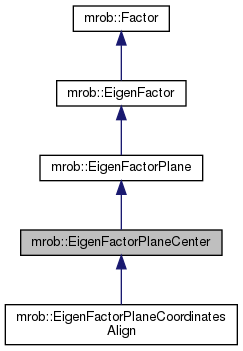
This is a copy of EF Plane for comparison Eigen factor Plane is a vertex that complies with the Fgraph standards and inherits from base EigenFactor.hpp
The Plane factor connects different poses that have observed the same geometric entity. It is not required an explicit parametrization of the plane, so the resultant topology is N nodes connecting to the plane factor.
NOTE: due to its nature, multiple observation can be added to the same EF, meaning we need to create a constructor PLUS an additional method
In order to build the problem we would follow the interface specifications by FGraph but we need extra methods and variables to keep track of the neighbours
This class assumes that matrices S = sum p*p' are calculated before since they are directly inputs XXX should we store all points?
Constructor & Destructor Documentation
◆ EigenFactorPlaneCenter()
| EigenFactorPlaneCenter::EigenFactorPlaneCenter | ( | Factor::robustFactorType | robust_type = Factor::robustFactorType::QUADRATIC | ) |
Creates an Eigen Factor plane. The minimum requirements are 1 pose, which is not required at this stage, but will be introduced when we add points/Q matrix.
Member Function Documentation
◆ estimate_plane()
|
overrideprotectedvirtual |
Estimates the plane parameters: v = [n', d]'_{4x1}, where v is unit, (due to the Eigen solution) although for standard plane estimation we could enforce unit on the normal vector n.
Reimplemented from mrob::EigenFactorPlane.
◆ evaluate_chi2()
|
overridevirtual |
Chi2 is a scaling of the plane error from lambda_min
Reimplemented from mrob::EigenFactorPlane.
Reimplemented in mrob::EigenFactorPlaneCoordinatesAlign.
◆ evaluate_jacobians()
|
overridevirtual |
Evaluates Jacobians, given the residual evaluated It also evaluated the Hessians
Reimplemented from mrob::EigenFactorPlane.
Reimplemented in mrob::EigenFactorPlaneCoordinatesAlign.
◆ evaluate_residuals()
|
overridevirtual |
Jacobians are not evaluated, just the residuals. This function is calculating the current plane estimation
Reimplemented from mrob::EigenFactorPlane.
Reimplemented in mrob::EigenFactorPlaneCoordinatesAlign.
The documentation for this class was generated from the following files:
- src/plane-surfaces/mrob/factors/EigenFactorPlaneCenter.hpp
- src/plane-surfaces/factors/EigenFactorPlaneCenter.cpp
